
Robotic Arms in Construction
Published:
The construction industry is experiencing the inevitable shift from manual labor completed by workers to automated labor completed by robots. This technology has already improved the speed and cost of manufacturing while reducing the number of errors and flaws in workmanship. The construction process is long and full of uncertainties, where more often than not projects take longer and are more expensive, all at the owner’s expense. There is motivation for the construction companies to be able to guarantee that these kinds of setbacks will not occur. Money talks and time is money, so if their customers had to choose between getting something completed on time and pay a little more upfront for it then they would. Contractors that do not embrace this advance in technology will be cornered out of a competitive market. The investment in this kind of equipment is something contractors would have to charge more for than their competitors, however they have something that others charging less do not and that is a guaranteed time of completion. Let’s see what these machines are made up of and how they interact in the construction site environment.
The machine of interest is called SAM (Semi-Automated Mason) and this specific machine performs the systematic process of laying mortar and bricks for buildings [1]. The machine is designed to work in parallel with construction workers, where workers have to provide raw materials to the unit. The machine is lifted onto a mast climbing work platform on the exterior of the building and has wheels that allows it to move left to right on the platform. Inside of a cage the robotic arm operates by using a end effector gripper that picks up bricks, applies mortar to two sides of the brick and then lays it in series with the next brick in sequence. The machine is equipt with laser leveling equipment that ensures the correct depth and placement of bricks. The only autonomous part of this process is the movement of the robotic arm, which appears to be predetermined so there is no component of active path planning or machine vision. This is far from artificial intelligence, but it does help automate the tedious process of laying brick and it can do so with sufficient precision. This system still has room for improvement and innovation.
This machine functions well on the jobsite but there is still room for improvement. The SAM does well laying brick and mortar, but it requires workers assistance to complete the joining and finishing of the mortar joints before it can lay the next layer. The shape of joints can vary depending on what the architect or owner specifies for the design, which is simply a matter of tooling. The robot would have to make twice the number of passes in its large enclosure in order to go back and finish the joints of the last layer. In order to avoid this a smaller trailing robot could complete the simple action of creating the specified joints between the bricks after it senses the correct level of moisture and hardness is in the mortar. Performing the jointing process at the right time requires information about the time that the brick was laid and the ambient conditions to ensure proper bonding. The diagram below shows an example of the attachment and a logical diagram of inputs and outputs communicated between the subsystems. This would increase jobsite functionality because then you only need workers to supply the SAM with raw materials.
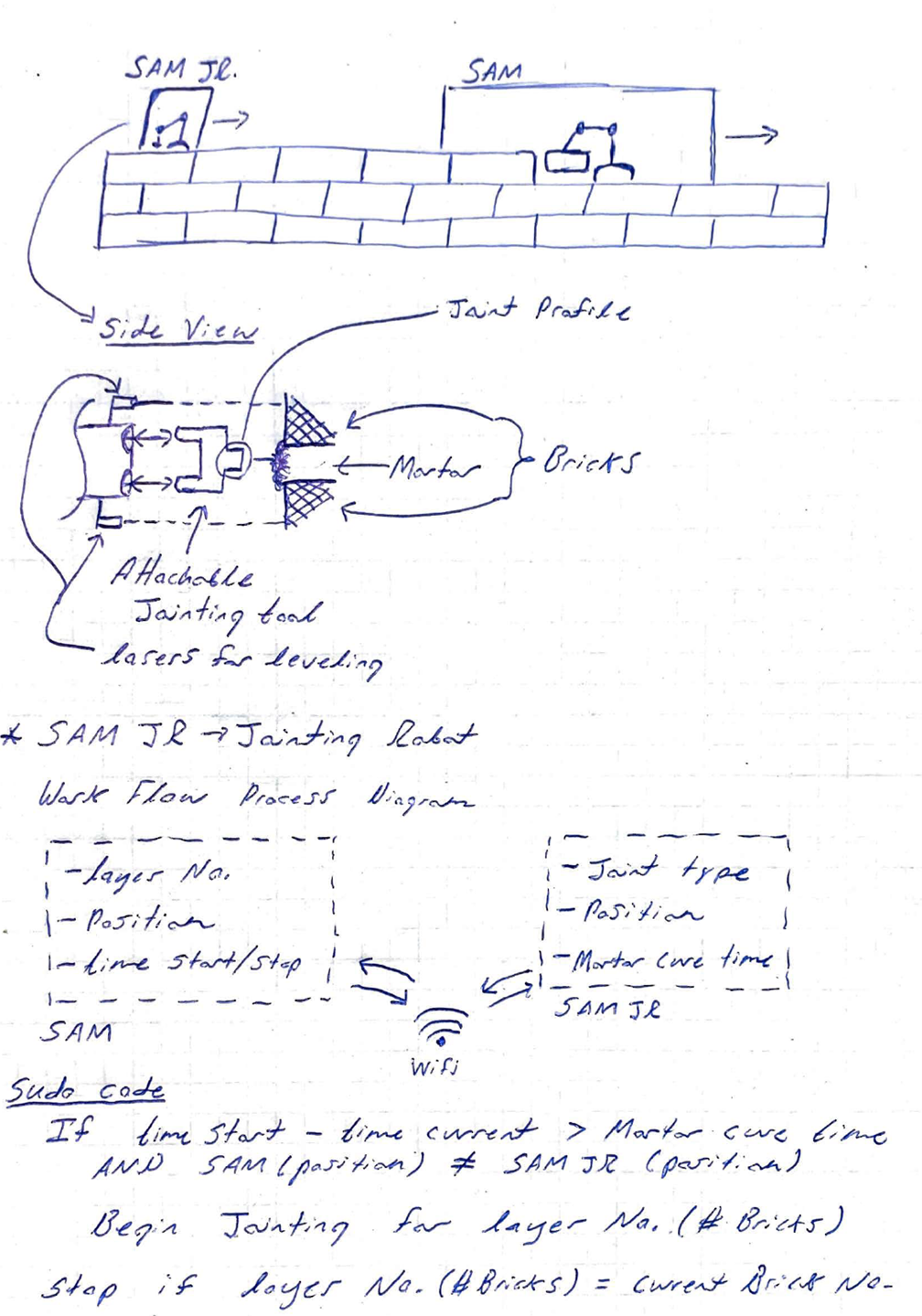
Figure 1. Concept sketch for SAM JR (Jointing Robot) that outlines a possible design improvement to the SAM.
References
[1] Construction Robotics, Semi-Automated Mason, https://www.construction-robotics.com/sam-2/